2025 Material-sensing radar with beamforming
designed and prototyped a radar that classifies materials using beamforming algorithms. theory to working prototype in 2 months. it could distinguish metal, wood, water, and a sandwich.
_____ _ _ _ / ____| | | | | (_) | | __ __ _ _ _| |_| |__ _ ___ _ __ | | |_ |/ _` | | | | __| '_ \| |/ _ \ '__| | |__| | (_| | |_| | |_| | | | | __/ | \_____|\__,_|\__,_|\__|_| |_|_|\___|_|
Engineer, maker
last updated: may 2026 · [v0.4 - still under construction ]
hi. this is my personal page. i build things. some of them work.
control engineering @ CentraleSupélec (MA, Sep 2021 — Nov 2025).
currently: building nff_ — nanoforgeflow.com. hardware, built instantly. no human in the loop.
radar-based fall-detection sensor that sees through walls. produces live point clouds of people in a space, streams the data over MQTT, and raises an alarm when it detects a fall. no cameras, no wearables.
site: waves.black
open-source MCP server that lets Claude run a Prusa printer end-to-end: search Printables, import STLs, auto-orient and slice with PrusaSlicer, recommend a print loadout, then start, pause, resume, stop, and monitor the job. fully dockerised, runs on a raspberry pi next to the printer. SO-ARM-100 integration and print-farm orchestration in the works.
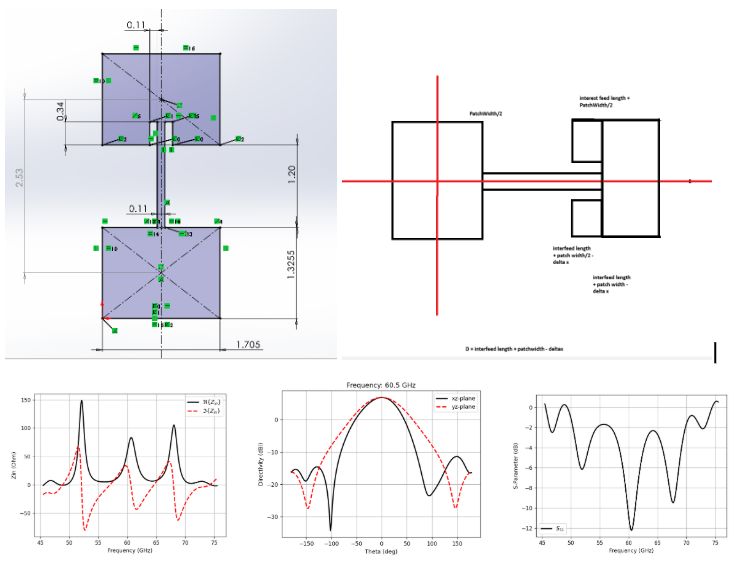
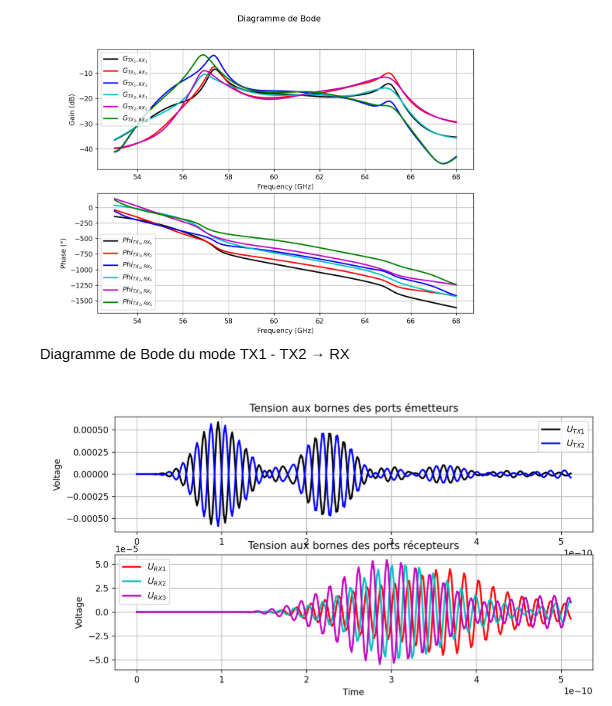
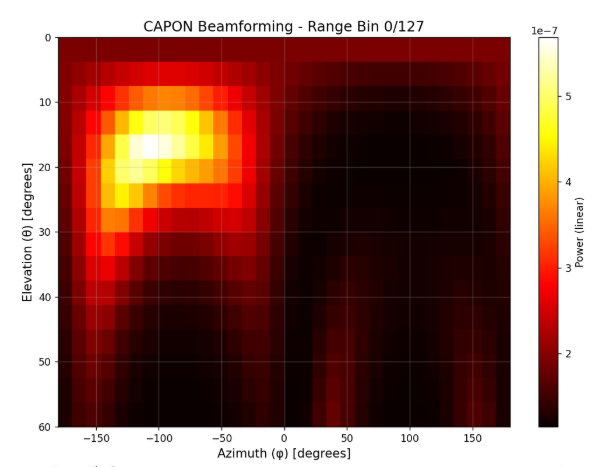
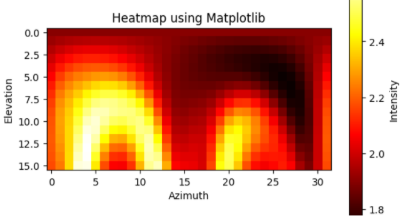
designed and prototyped a radar that classifies materials using beamforming algorithms. theory to working prototype in 2 months. it could distinguish metal, wood, water, and a sandwich.
built a full pipeline that recognizes boilers from photos. didn't have enough real data, so i generated synthetic training images in Blender — randomized boilers, lighting, backgrounds, camera angles — and trained on those. generalized to real photos better than expected.
built an indoor localization system that maps and tracks people inside a building using only WiFi signal strengths. no extra hardware — just whatever access points are already on the wall. ~1m precision in real time.
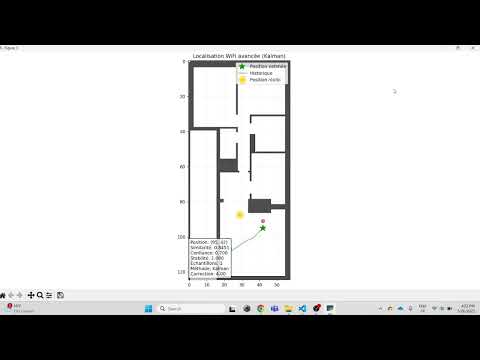
video: youtube.com/watch?v=ikQp_fq005k · code: github.com/GLechevalier/IndoorMapperWIFI
self-taught Blender from scratch and made a 2-minute hype video. full 3D. lighting, materials, camera moves, the whole thing. render times measured in episodes of TV watched.
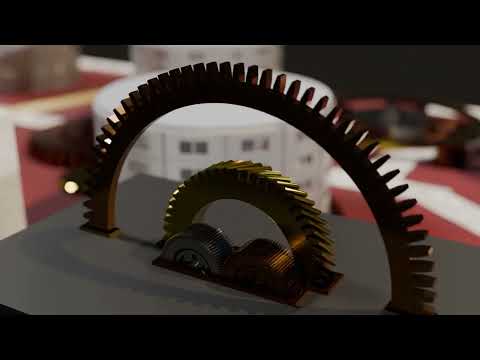
video: youtu.be/Eu749JjcuZU
control algorithms + real-world flight testing for a drone that intercepts other drones. involved a non-trivial number of crashes during tuning. learned a lot about kalman filters and hot glue.

video: youtu.be/Rsajr-_9HbE
co-built a student org from zero. raised €100k in a single year to design and deploy pro-like event scenes — lighting rigs, sound, structures — for night events on campus. recruited and led a 20-person team. none of us had done this before.





programmed a neural network from scratch in python (no frameworks, just numpy and a lot of chain rule) to recognize my own voice. backprop by hand. it eventually said "hi gauthier" with reasonable confidence.
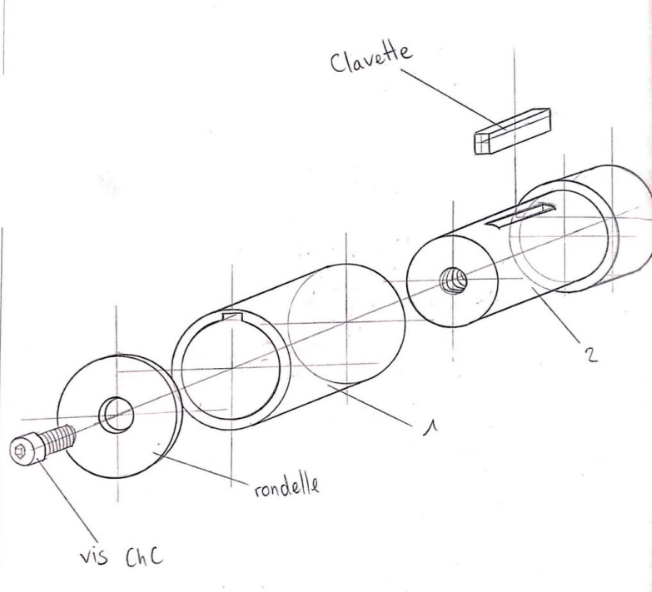
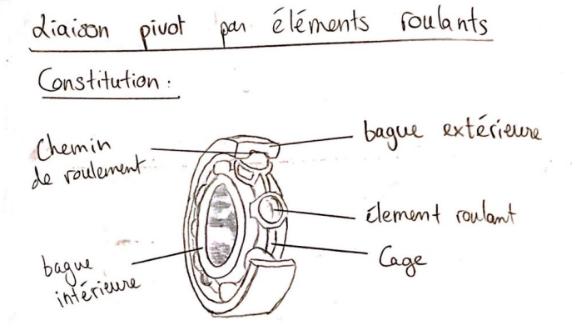
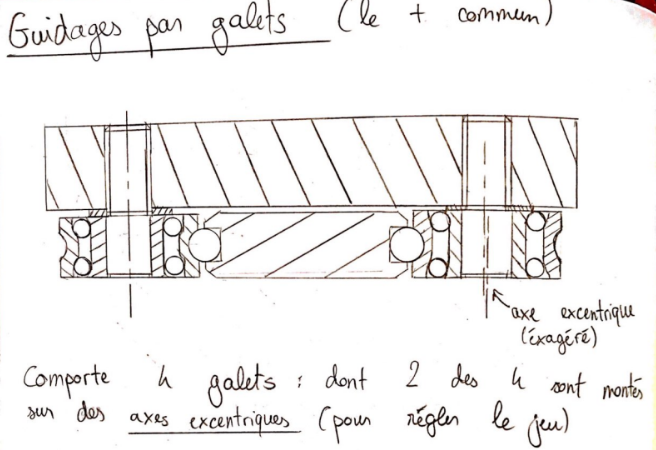
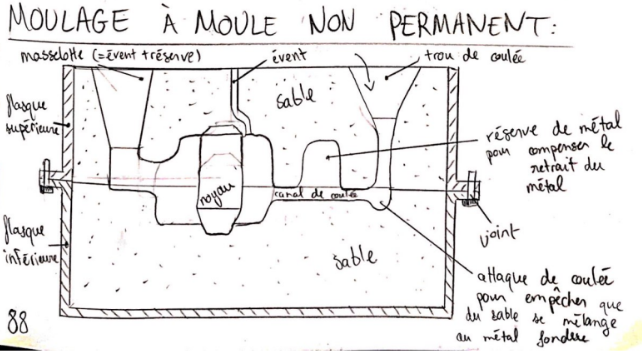
i drew an entire technology manual. by hand. every diagram, every illustration, every label. a few pages below — click any to enlarge.
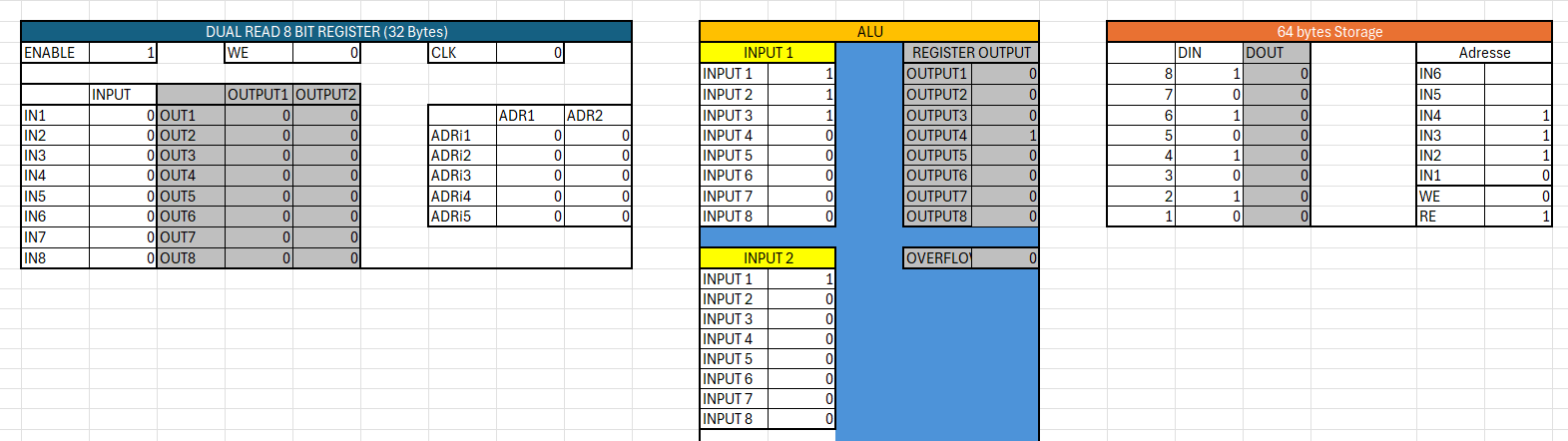
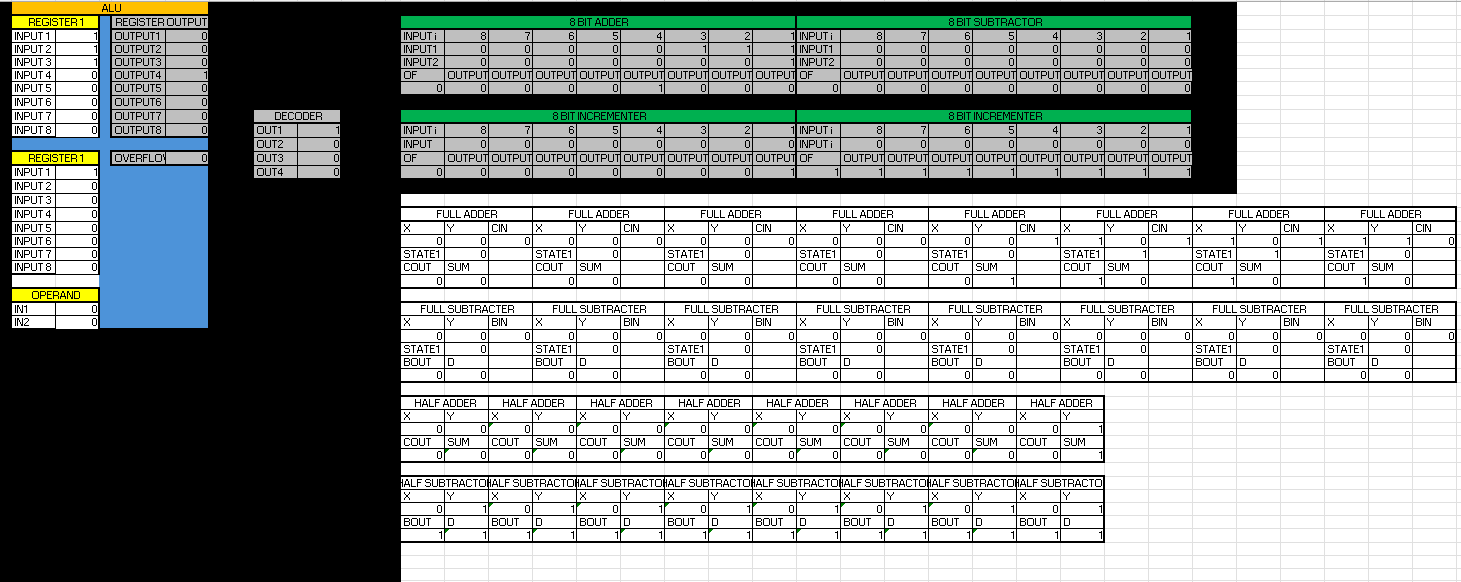
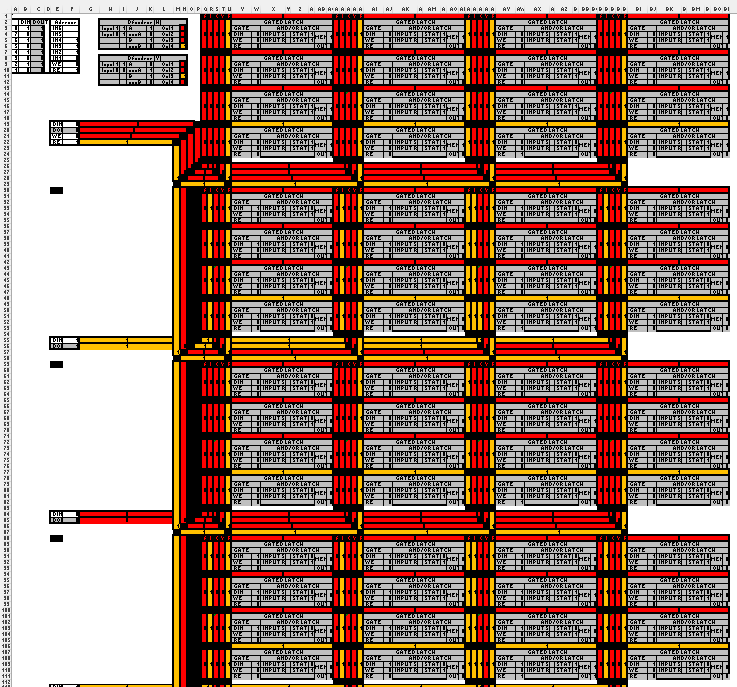
built a partial CPU entirely out of Excel formulas. started with NAND, stacked up half/full adders and subtractors, an 8-bit incrementer, an 8-bit ALU, gated latches, an 8-bit dual-read register file (32 bytes) and 64 bytes of addressable storage with WE/RE lines. no macros, no VBA — just cell formulas and a manual clock toggle.
designed and built a compressed-air propelled car for a school race. body shaped from hand-formed aluminium over a wooden mold, painted silver and red, mounted on a chassis with a CO2-style air cartridge for propulsion. raced it in a relay with the rest of the team. fast, loud, and surprisingly straight.



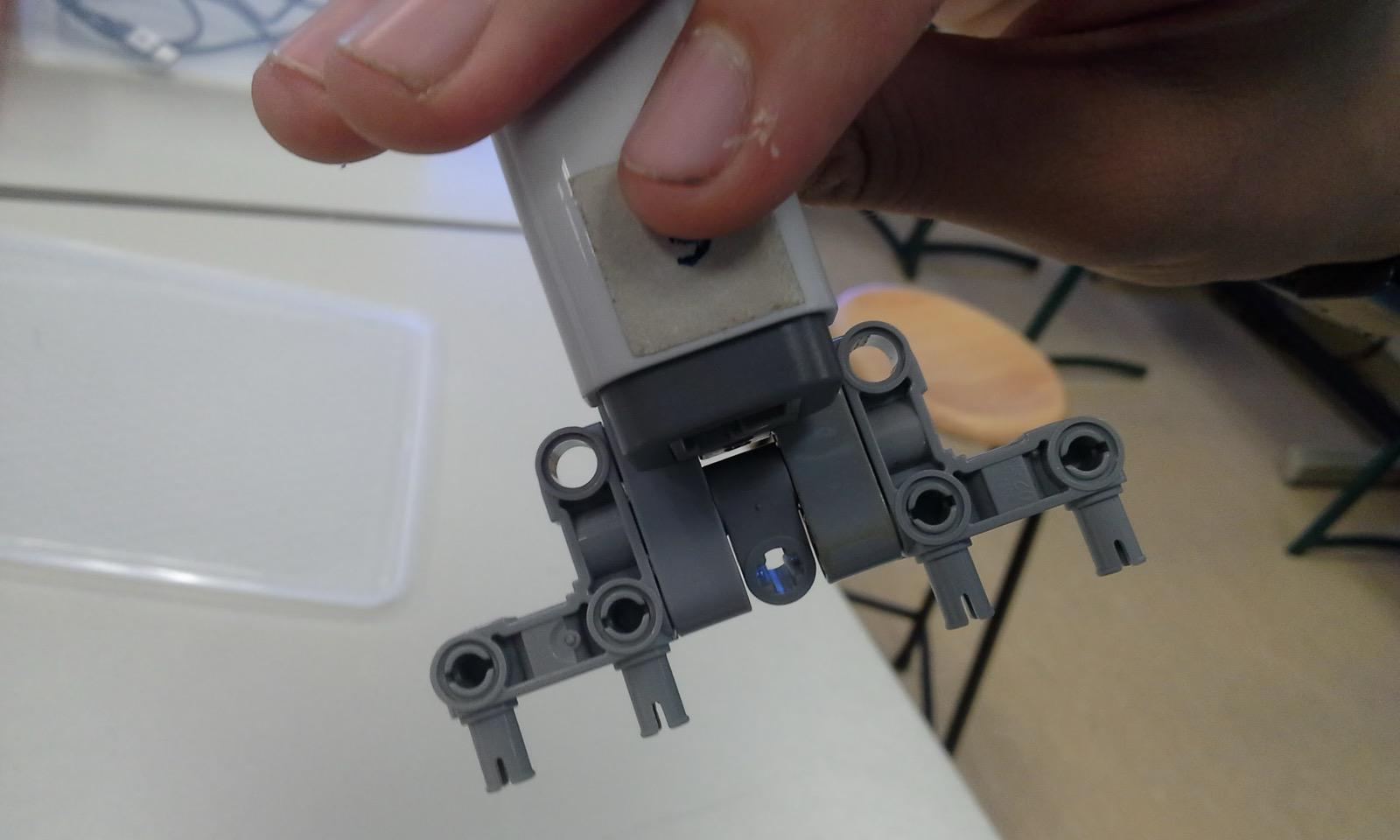
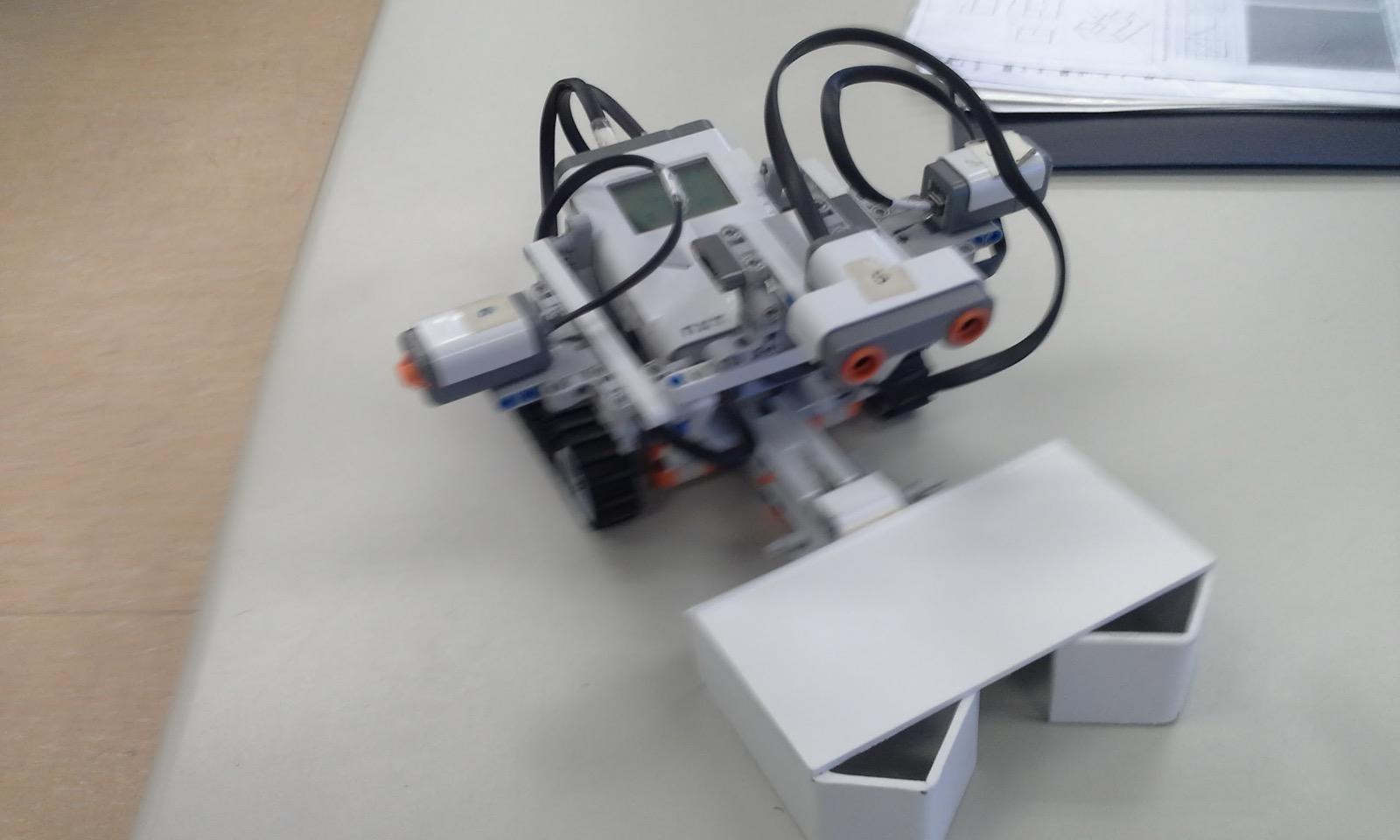
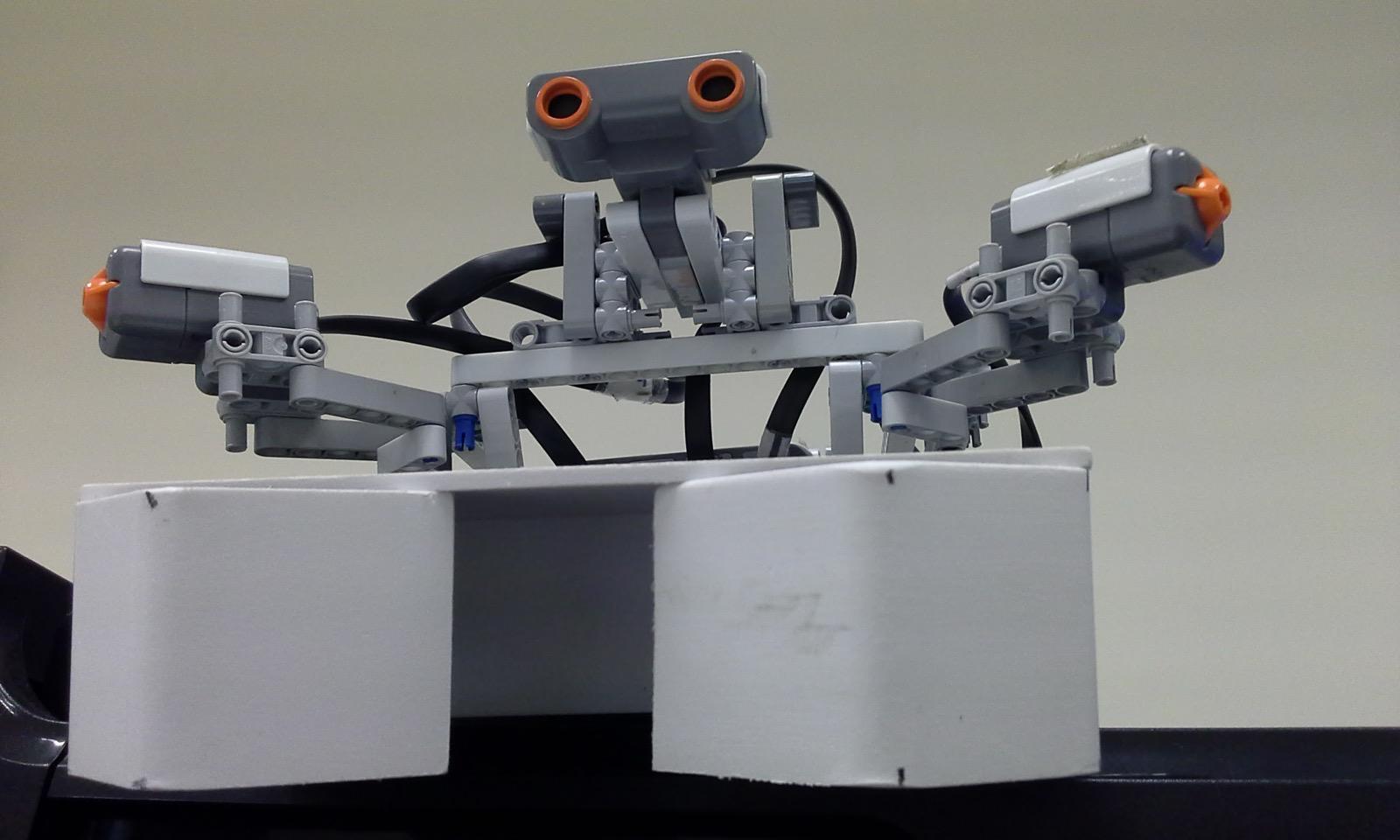
built and programmed a Lego robot to catch as many marbles as possible in 2 minutes — middle school competition. designed the marble-catching mechanism from scratch and bolted it to the robot. wrote the control code for the whole thing. the robot worked. we won first place.
© gauthier lechevalier. no tracking. no cookies. no js framework.
this page weighs less than the favicon of most websites.
visitor #00043